近日,南京航空航天大学机电学院研究员吉爱红团队通过对蛇骨的仿生研究,开发出了新型欠驱动连续体机器人,相关成果以题为“A Snake-Inspired Layer-Driven Continuum Robot”的论文发表在国际顶级期刊Soft Robotics(简称Soft Robot,IF=8.071),第一作者是机电学院博士秦国栋,吉爱红和中科院等离子体物理研究所副研究员程勇为论文共同通讯作者。
连续体机器人的设计灵感来源于自然界的脊椎和无脊椎动物,如蛇、象鼻、八爪鱼和动物尾巴等,将驱动单元(马达等)置于机器人工作空间之外,使得机器人整体结构得到简化,运动姿态可较完整的呈现流线型构型。这种外部驱动的“仿生肌腱”设计,驱动系统集中在尾部,使得整个臂长无过多的电子设备非常适合核电等高危、辐射、狭窄空间领域作业。在大型复杂设备及狭小空间监测和维护中意义重大,具有迫切的实际应用需求。
近年来,吉爱红团队与中科院等离子体物理研究所合作成立了极端环境机器人技术联合实验室。通过对极端环境需求分析和仿生学设计,研发了新型分层驱动连续体蛇形机器人。结构上模拟蛇的“S”形几何运动形态,采用由多个刚性关节单元构成的连续体关节单元相互串联而成(如图1所示)。
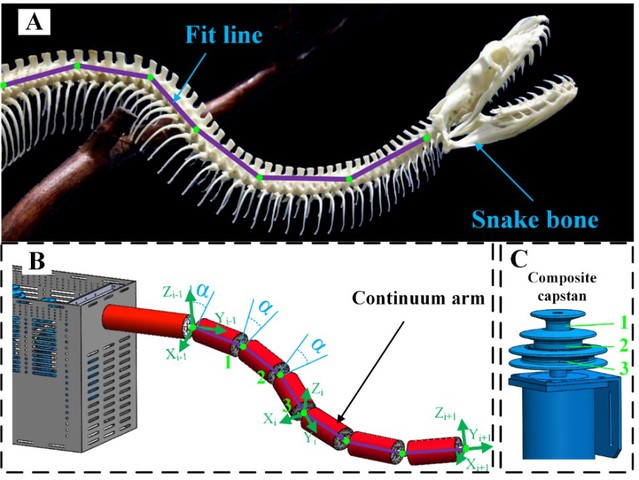
图1. 连续体仿蛇形机器人构型设计通过模拟蛇的运动形态设计连续体机器人
(A)蛇的骨骼结构呈现“S”运动构型;
(B)连续体仿蛇形机器人样机模型(由两部分构成:末端驱动箱、和连续体蛇形臂:包含两个连续体关节单元,每个连续体关节单 元由三个刚性体关节单元构成,采用分层驱动原理实现空间内转角同步设计);
(C)驱动电机上安装的复合驱动绞盘可同时牵引多跟钢丝绳实现连续体的空间转角同步控制。
该连续体仿蛇形机器人由若干连续体关节通过万向节串接构成,具有超冗余的自由度,可以保持较高的避障能力及足够大的灵巧操作空间。单个连续体关节包含3个刚性关节,通过万向节串接而成,相邻刚性关节单元具有空间内转角同步的特性,相比于超冗余自由度机器人可成倍数降低末端驱动电机数目提高总弯曲曲率,简化运动学模型降低控制系统复杂性提高运算效率。
未来,蛇形连续体机器人的应用还将不断完善。团队将进一步研究层驱动蛇形机器人轨迹跟踪和主从遥操作控制算法,以提高其在极端狭窄工作环境中的操作能力。
吉爱红团队主要从事动物运动的仿生机理与特种机器人技术和应用研究,该论文研究工作得到中国国家重点研发项目(2019YFB1309604)和国家磁约束聚变科学项目(2017YFE0300503)的资助。
论文链接:http://doi.org/10.1089/soro.2020.0165