你见过没有尾巴的机器鱼吗?你看过又会跳舞又会卖萌的舞蹈机器人吗?你在脑海里想象过状似挖掘机的仿生腿机器人吗?……在第五届江苏省机器人大赛中的获奖作品中就出现了这些超现实的机器人,它们均由南京航空航天大学的同学们设计制作。亲,快来看看机器人们的新技能吧! 水下机器人,检测采样二合一 时而直线巡游前进,时而原地漂浮转向,这个正在水中展示的灵活的机器人“Stingray(魟鱼)”是来自南航的谭进波同学和他的团队成员共同设计的,该作品一举夺得了本届江苏省机器人大赛一等奖。 队长谭进波同学介绍说:“我们是用以胸鳍波动推进鱼类中的魟鱼为仿生原型,同时也以它的名字命名。‘Stingray’是一只游动平稳、机动性能良好的胸鳍波动推进仿生机器鱼,可下达二米深的水底进行探测,可以通过探索胸鳍波动仿生游动方式,推进机理和运动控制的方法,为未来水下勘测、近海防御和远海侦察提供一种新型的水下仿生机器人。”这是首次提出圆形鳍面结构高机动性仿生机器鱼设想的队伍,相对于传统的靠尾鳍摆动推进的机器鱼,它在控制上更加灵活,稳定性更好。 目前,水质污染水下污染源难以确定是解决水污染的难点之一,而这只机器鱼可以很好地解决这一困难。“在水质监测部门的污水检测中,我们的机器鱼可以游到人无法到达的地方采样,找出污染源,有效节约了时间与经济成本。”谭同学说。 舞蹈机器人,不只是娱乐 “哇,这个机器人好像蜘蛛”,“哈哈,它跳舞的样子好萌”……多足舞蹈机器人的登场,让大家眼前一亮。这个萌萌的机器人叫Corexapod,它是由南航机电学院王成欣同学带头设计的,同样也获得了第五届江苏省机器人大赛一等奖。 据王成欣同学介绍,Corexapod机器人的控制部分采用了“树莓派”开源系统,借鉴了国外学者先进的设计,减少了开发时间。另外,整个机器人系统还运用了逆运动学机制,通过对机器人腿部的路径规划,对其逆运动学特性进行建模,克服了传统动作组方法的缺陷,使机器人的三角式步态具有更好的灵活性。 “我们还为Corexapod设计了友好的用户界面,支持局域网内使用web/ios设备对其进行控制,让机器人上下楼梯、表演舞蹈,可适用于家庭娱乐,”王成欣同学说,“最近实时建模技术也比较火,我们可以为机器人装上激光雷达,实现3D建模。除此之外,还可以利用我们学校特色,为其装上螺旋桨等,让它飞起来表演‘飞天’哦!”王同学笑着说。 机械仿生腿,让行走更加流畅 几根曲轴,几块亚克力板,用不同结构组合在一起就成为了一个机械仿生腿。不论是在砂石路面还是在陡坡,它都如履平地。这就是南航大四学生阮得盼以及他的团队设计的“步行者”腿部仿生机器人。 “我有一个汽车模型,虽然平地上走得很平稳,但一到颠簸的路面就晃动的厉害,甚至坡道都走不了。但是人和动物因为有腿,就能够灵活地走过陡坡,所以我们就想能不能用腿代替轮子,”队长阮得盼解释说,“我们设计了两组腿,分别代替汽车的两组轮子。它的结构就类似于动物的腿,由曲轴旋转带动腿以设定的轨迹运动,从而带动整体前进。前后两组腿分别用一个连杆连在一起,连杆同时又连接着舵机,通过舵机带动腿部的转向。”为了找到最适合的连接零件,队长亲自测量画图设计形状,并用3D打印机打印出来,最大程度上保证了轮子结构的稳固。 所有有轮子的交通工具都能应用上这组腿,并且应用“步行者”之后适应路面的能力会更强。“目前轮椅、十分流行的代步车等经过砂石路面或陡坡都会遇到很大阻力,但要是将轮子换成仿生腿就轻松通过了。” 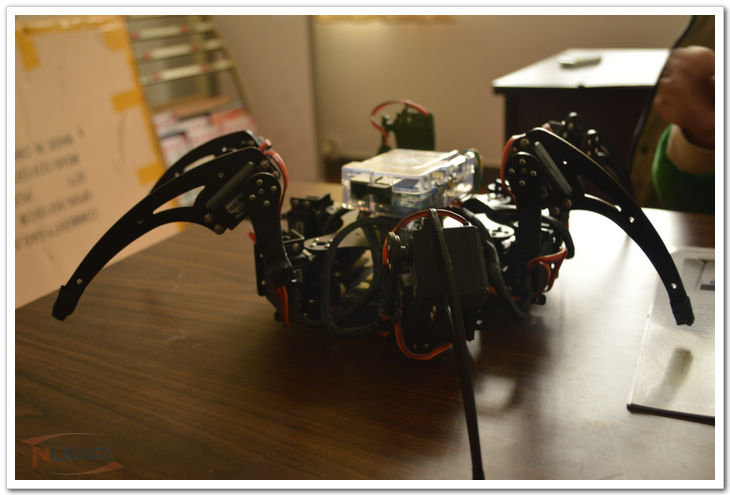 |
版权所有:南京航空航天大学 ALL RIGHTS RESERVED
总浏览量: